This article was first published on Computer Vision News of June 2022.
Martina Finocchiaro and Sanat Ramesh are Marie Curie PhD students and part of the European project ATLAS (or ‘AuTonomous intraLuminAl Surgery’). Martina is enrolled in two universities: the Technical University of Catalonia in Barcelona and the Sant’Anna School of Advanced Studies in Pisa. Sanat is jointly supervised by Professor Paolo Fiorini from the University of Verona and Professor Nicolas Padoy from the University of Strasbourg in France. We speak to them fresh from winning the Best Demo Award at CRAS 2022 in Italy for their steerable robotic platform for robot-assisted intraluminal procedures in the urinary tract.
Ureteroscopy is not an easy procedure to perform. Navigation inside the urinary tract is complex, and it depends on the user’s experience as to whether it will be successful. The operator must avoid touching the walls of the lumen inside the ureter as this could cause lesions. Localization is achieved by performing repetitive X-rays, which can be harmful to both patient and user.
Martina and Sanat’s award-winning work includes a steerable robotic device – developed by Chun-Feng Lai, one of the project’s co-authors – which travels along the urinary tract with a camera at the tooltip. It can be controlled autonomously or manually with a joystick.
It has an autonomous visual-motor system that tracks the center of the lumen and moves the device’s tip towards it, which helps avoid the risk of lesions. The clinician always has the option to revert to manual control.
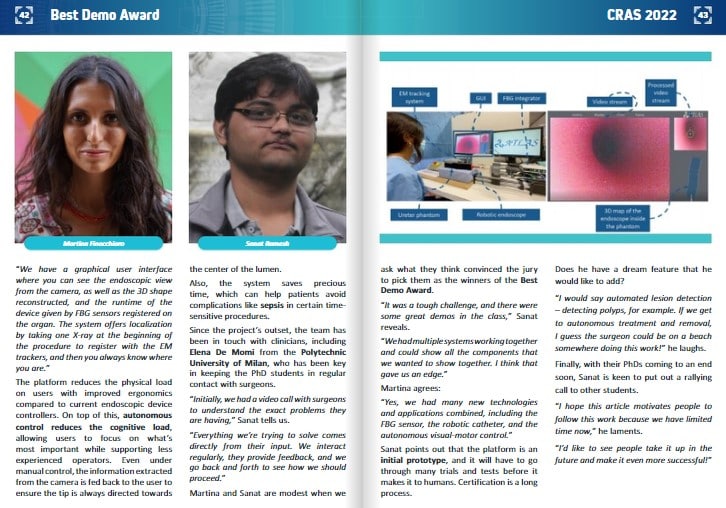
“We use FBG sensors together with EM trackers to localize the whole length of the device and provide this information back to the user,” Martina explains.
“We have a graphical user interface where you can see the endoscopic view from the camera, as well as the 3D shape reconstructed, and the runtime of the device given by FBG sensors registered on the organ. The system offers localization by taking one X-ray at the beginning of the procedure to register with the EM trackers, and then you always know where you are.”
The platform reduces the physical load on users with improved ergonomics compared to current endoscopic device controllers. On top of this, autonomous control reduces the cognitive load, allowing users to focus on what’s most important while supporting less experienced operators. Even under manual control, the information extracted from the camera is fed back to the user to ensure the tip is always directed towards the center of the lumen.
Also, the system saves precious time, which can help patients avoid complications like sepsis in certain time-sensitive procedures.
Since the project’s outset, the team has been in touch with clinicians, including Elena De Momi from the Polytechnic University of Milan, who has been key in keeping the PhD students in regular contact with surgeons.
“Initially, we had a video call with surgeons to understand the exact problems they are having,” Sanat tells us.
“Everything we’re trying to solve comes directly from their input. We interact regularly, they provide feedback, and we go back and forth to see how we should proceed.”
Martina and Sanat are modest when we ask what they think convinced the jury to pick them as the winners of the Best Demo Award.
“It was a tough challenge, and there were some great demos in the class,” Sanat reveals.
“We had multiple systems working together and could show all the components that we wanted to show together. I think that gave us an edge.”
Martina agrees:
“Yes, we had many new technologies and applications combined, including the FBG sensor, the robotic catheter, and the autonomous visual-motor control.”
Sanat points out that the platform is an initial prototype, and it will have to go through many trials and tests before it makes it to humans. Certification is a long process.
Does he have a dream feature that he would like to add?
“I would say automated lesion detection – detecting polyps, for example. If we get to autonomous treatment and removal, I guess the surgeon could be on a beach somewhere doing this work!” he laughs.
Finally, with their PhDs coming to an end soon, Sanat is keen to put out a rallying call to other students.
“I hope this article motivates people to follow this work because we have limited time now,” he laments.
“I’d like to see people take it up in the future and make it even more successful!”
Keep reading the Medical Imaging News section of our magazine.