Registration between tracking system and CT scan
When the tracking system and the CT scan successively combines and no misalignment is found, a registration between them is achieved. In this way, every movement and orientation of the surgery tool is easily translated into a combined view, offering the surgeon in the operation room a very powerful visual aid to perform the intended procedure.

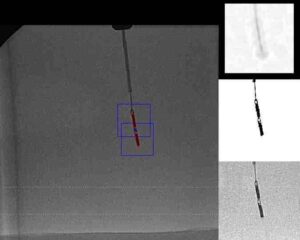
Registration of CT and X-ray images
This step correlates the bones scanned, during pre-operation’s CT scan with bones scanned in-op (during the operation) via C-Arm (X-Ray). The algorithm gets a set of C-Scan 2D images (from the X-Ray) and a 3D scan (from CT). Using an optimization process, the 2D scans are accurately correlated to the 3D scan. The algorithm uses the pixel size obtained from the calibration model to make sure the bones are matched (object-wise) even when scans resolutions (2D to 3D) differ.

The yield transformation Registration of CT and X-ray here shows the location of each pixel of the C-Arm scans in the CT 3D scan. In this way, Registration of CT and X-ray is achieved.
This is the third in a series of five articles about Orthopedic Navigation. Read the next article about Navigation system tools in Orthopedic Surgeries. You can also read about RSIP Vision’s other works in Orthopedic Surgery.