Minimally Invasive Surgery (MIS) has emerged as a paradigm shift in modern surgical practices dating back to the early 1990s.
What is Minimally Invasive Surgery?
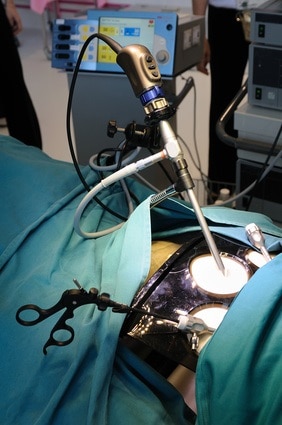
It is a type of intervention done by performing a series of small skin incisions through which instruments are inserted and guided toward the target organ. Instruments are controlled remotely from a control station manned by a physician, which manipulates the instruments guided by imaging. The image source can be external, such as coming from fluoroscopy or a camera mounted on top of the patient, or internal from a camera inserted along with the instruments.
What are the advantages of minimally invasive surgery?
Advantages of minimally invasive surgery have been confirmed in respect to safety, patient survival and recurrence rates in oncology. Moreover, due to the low number of incisions needed to perform operation, body trauma is reduced and recovery time is significantly shorter than that needed following open surgeries.
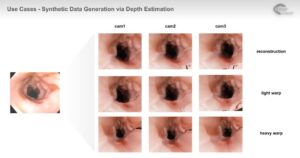
Robotic surgery brings many opportunities for image analysis, image understanding and computer vision. In minimally invasive surgery, images of internal organs can be used to visualize the surgical site and create an in vivo 3D tissue surface to aid physicians navigation. Computer vision techniques can be used to enhance the capabilities of MIS robotic systems by continuously providing quantitative information such as tissue thickness and its biophotonic characteristics, along with a tissue CAD surfaces. A measurement of the interaction between light and tissue can be used to infer the functional characteristics of the tissue and convey it along with the CAD model.
One important application in minimally invasive robotic surgery is reconstruction and tracking of deformable tissues. Real-time temporal motion tracking is used to stabilize micro-equipment during operation, which is especially important for closed-chest cardio surgery on a beating heart. In these surgeries, both the cardiac cycle and respiratory motion render delicate and precise procedures difficult. Operating manually requires physician dexterity while even small motion can interfere with the procedure. Automatic motion compensation of the equipment can relieve such constraints by allowing surgeons in robotic surgery to operate in stable environment. Laparoscopic cameras (mono or stereoscopic) provide essential visual information which allows such automatic stabilization of equipment.
Tracking the trajectories of fiducial markers on deformable tissue provides means to extract frequency of respiratory and cardiac cycle. When stereoscopic laparoscope is used, the image depth information can be extracted by means of point correspondence using epi-polar geometry. Combining both fiducial point tracking with depth information provides a rich set of data. The reconstructed surface can be displayed to the operator in order to assist navigation, while the frequency information is used to compensate for tissue motion.
Motion compensation, as well as tracking and extraction of respiratory and cardiac cycles have been successfully performed by RSIP Vision in cardiology applications. Please see our exciting projects to learn more about how RSIP Vision’s algorithms operate in robotic surgery settings.
 Surgical
Surgical