The use by the surgical community of single-port as a surgical approach is increasing in frequency. A port is the entrance gate of the tools into the patient’s body during a surgery. Currently, most laparoscopies require multiple ports for the camera and tools, whereas single-port approach utilizes one port for all the tools and the camera.
The main benefits of this approach are that it offers similar results to multi-port approach while allowing for faster healing, less pain for the patient, and better cosmetic outcomes. Technically, single-port is challenging as it requires to maneuver all the tools and camera through the same port, resulting in multiple movement constraints throughout the procedure. This is why most companies that develop single-port solutions concentrate most R&D efforts on the hardware, to verify that the surgeon can perform the surgery adequately regardless of the spatial constraints. Therefore, the different tools and camera should have extreme maneuverability, making their development a complex process.

RSIP Vision has researched what we can do as a software company to assist and solve limitations of single-port surgery. Let’s start by saying that a single-port surgery is a robotic surgery: anything that can help the regular robot helps a single-port robot. Anything Artificial Intelligence (AI) can provide to assist the robotic surgery – like imaging techniques – are relevant to the single-port surgery problem as well.
In what ways single-port surgeries are different from multi-port surgeries? In what ways can AI help reduce the difference between single-port surgeries and multi-port surgeries? We will see that in some detail now. In single-port interventions, camera and tools come from the same direction, camera’s movements being more limited – the field of view being generally more limited. It also needs to be out of the way of the tools to let it work properly. Cameras need also to be smaller, to fit in a single entrance to the body, thus they are not able to allow for large field of view. AI needs to compensate for that.
It does that with specific tool tracking, but not just within the camera’s field of view. Let’s see how. tool tracking is good for any robotic surgery: you know where the tools are, what angles they have and what directions they go. But in single-port surgery, the tools can move out of the field of view and still, the surgeon needs to know where they are. If AI is able to track the tool in such a way that the surgeon knows about it even though it is out of the field of view, the tool can still be in the image sent to the surgeon. When the tool will be needed, the surgeon is able to bring it closer without hitting the camera or other tools and without damaging the body tissues. Tools will not cross by mistake and this way AI gives a very critical contribution: it assists in giving full navigation information even when the field of view is limited and the tool is out of the frame.
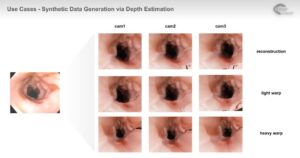
Let’s talk about another feature of AI that can help the single-port robot. Surgeons are often trained to approach the intervention from a given point of view and see things from a specific angle. They interact with the patient’s anatomy based on what they see. In single-port surgery this cannot always be the case. Mapping of the scene is therefore very helpful: it helps know exactly what organs and tissues are within the field of view, track them all the time and maybe even automatically label them. In this way, the surgeon can accommodate better to the different point of view given by the single-port. To do that, AI needs to map the different areas of the scene: for instance, instantly tell apart the liver and a blood vessel, correctly label them and track them also relative to the tools, using that narrow field of view. Also, what is outside the image might be mapped, as we have seen with the tool. This allows the surgeon to watch a larger map than is directly seen by the camera. This can be a map from a pre-op scan registered to the image or using enough data and deep learning algorithms to map the full area using a single image.
How does AI provide this feature? Given enough training data, AI can automatically segment every part of the image. It can very easily segment the tool: by calibrating the camera, we can know where the tool is, whether it is in the image or out of it, how far it is and what direction it is going. Modern AI algorithms master this part very thoroughly. The scene mapping is a bit more difficult and requires more expert work, but given enough data you can train networks to classify specific organs, specific subsections within the image, and to keep the map continuously tracking things during the procedures, even when they move around.
More challenges may appear with time, when more single-port robots will be in the market. AI is ready to assist with the familiar ones.
 Surgical
Surgical