In the past few years, depth cameras became common and easy to get. Several product are available in the market at a reasonable price, e.g. Microsoft Kinect and Intel RealSense. Some recent smartphone also have depth cameras.
In this project, we demonstrate our system for creating 3D models from depth data recorded over time by simple depth sensors, as can be seen in the following video.
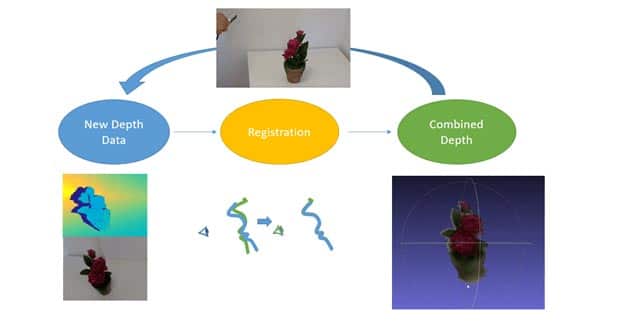
Registration of images from depth cameras:
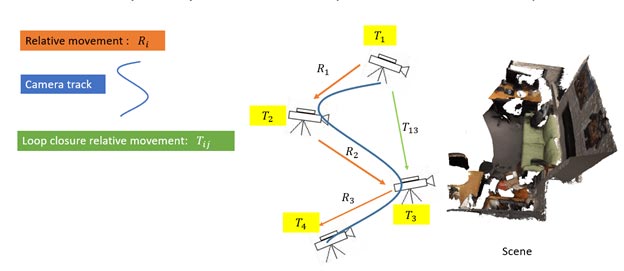
The system gets the depth and RGB streaming from the depth camera and it registers each consecutive depth frames, in order to find the movement of the camera. The registered depth information is averaged over time to get a consistent 3D model.
Running time of the system:
The 3D models from depth cameras system is implemented very efficiently on the GPU and hence can run in real time.
Real world applications:
There are many applications of 3D scans. Here are some practical examples from the real world:
- Face scanning and body scanning can be used to let a consumer try clothes or glasses from home.
- A room can be scanned, and 3D furniture can be placed in the room virtually before buying.
- A scanned object can be duplicated and printed by a 3D printer.
Results – building 3D models in real time:
RSIP Vision’s 3D scanning system achieves fast, robust and accurate 3D models in real time, while the software is easily deployable on standard PC hardware with standard NVIDIA GPU. RSIP Vision has a several decades’ long experience in 3D image processing. Consult the latest articles about our algorithmic projects on our blog.





