Although the geometrical information gathered from a print is important for accurate verification, the algorithms for matching need to compare the scan against a databases containing sometimes millions of prints (roughly, the 10 fingers prints times the number of individuals recorded). To reduce the complexity of matching, a reduction of the database search space is needed.
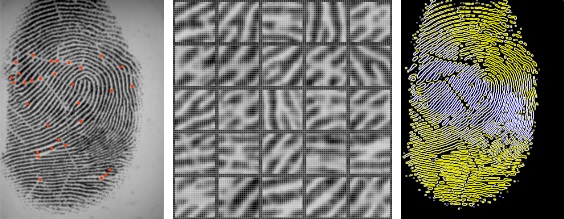
The prevalent manner to achieve such a reduction is to compare keypoints of scan rather than pixel by pixel comparison. For this end, scale-invariant features are preferred, allowing to perform comparison between two images that aren’t perfectly aligned or acquired using the same technique. Using scale-invariant features a recording of a print consists in the original image and a set of salient points along with their descriptors. Example of common keypoints (minutiae) are: corners (Harris), bifurcations points, ridge endings, and loops. In addition, the orientation field of a print’s ridges can be computed and stored along with the position and descriptors of features. Matching keypoints and their descriptors should take into account their relative distribution in space, and their spatial alignment and orientation with a test print.
One advantage of the use of keypoint-descriptors matching is the ability to evaluate the match of a partial print against the database. Such partial prints are retrieved forensically in a crime scene, where dust or fluids can contaminate the print.
Beyond challenges in Fingerprint Recognition and Matching
Despite the huge advances in the development of scanners and modalities for fingerprint acquisition and analysis, there still remain challenges in retrieval and match of fingerprints, predominantly for partial prints. A tailor-made algorithmic solution is often needed to resolve such difficulties. For this end, RSIP Vision’s three decades of expertise in computer vision, image processing and machine learning are a key factor for success. We offer our clients high-end solutions for challenging problems, using cutting edge algorithmic solution, in a wide range of domains. To review RSIP Vision’s selected projects, please visit our project page.





