














 9 / 56
9 / 56

Qualitative results on the Kitti 2012 dataset:
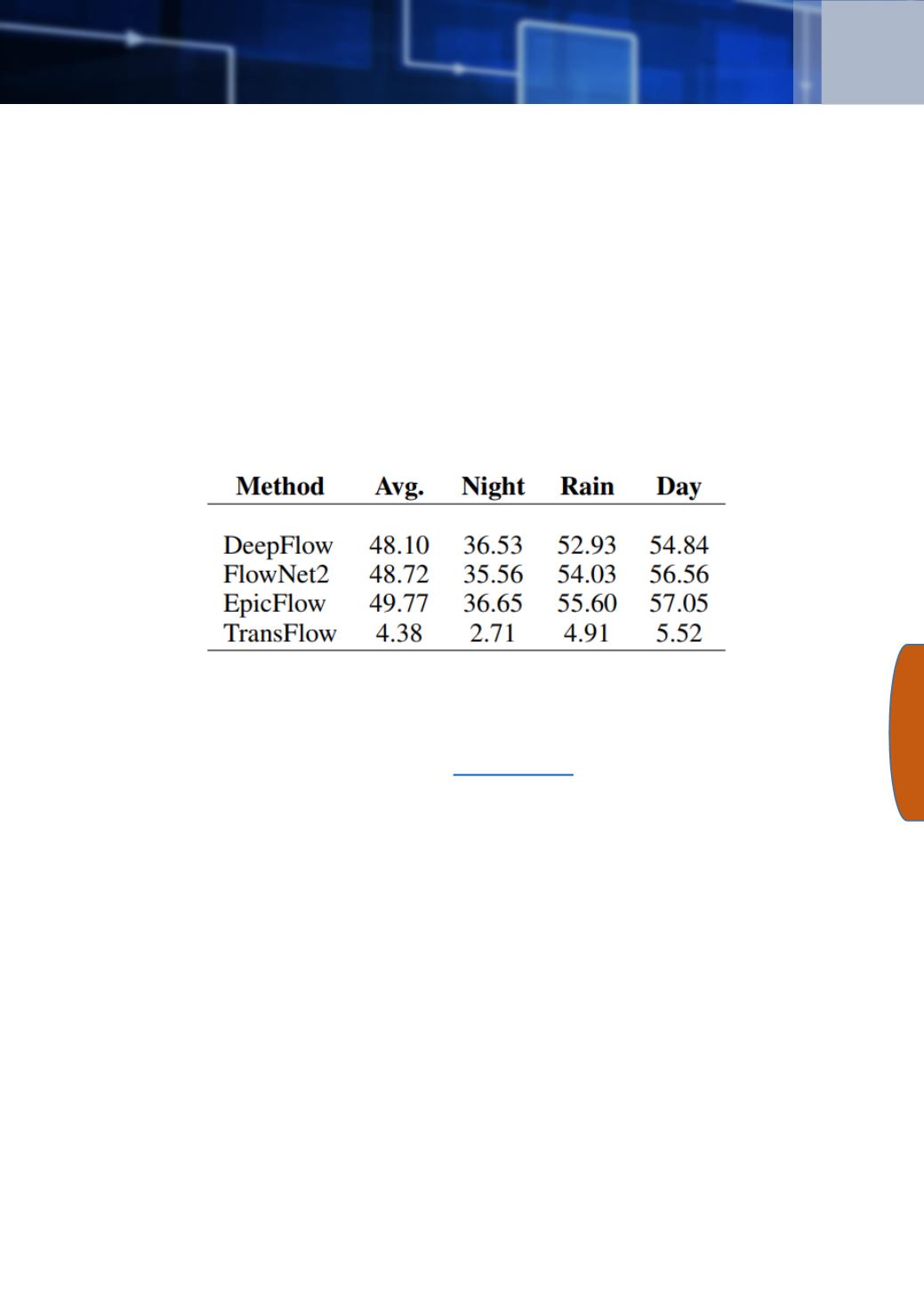
TransFlow was further experimentally evaluated on the Virtual Kitti dataset.
Though featuring the typical automotive perspective, due to being synthetic it
has unique problems, such as the presence of the typical artifacts of computer
rendered scenes. Nonetheless, it is currently the biggest dataset providing
ground truth automotive optical flow. Due to the dataset being very recent, no
results are publicly available and we evaluate DeepFlow, EpicFlow and
FlowNetv2. The results show how all three methods perform quite poorly on
this novel dataset, demonstrating the lack of generality mainly due to the
synthetic nature of the rendered scenes.
More results, including the DR(eye)VE dataset with 555,000, featuring steep
changes in image conditions due to transitions between day and night, weather
conditions and scenarios, can be found
in the paper .Sum-up:
TransFlow is an unsupervised optical flow method that can be applied without
requiring ground-truth generation. It successfully deals with the complexity of
unsupervised training by first producing a global estimate of car motion (H-
transform), using a shallow network. Then, using that product as initialization for
a dense, complex network producing pixel-level transformation (F-transform).
The experimental evaluation demonstrate how the proposed method
outperforms recent unsupervised methods while maintaining the advantages of
simplicity and speed in an end-to-end framework build on neural network only.
Computer Vision NewsResearch
9
Research
“TransFlow is an unsupervised optical flow method that
can be applied without requiring ground-truth
generation. It successfully deals with the complexity of
unsupervised training by first producing a global
estimate of car motion using a shallow network”