














 7 / 56
7 / 56

often correspond to motion boundaries. Its output of a high dimensional
Gaussian filter is given by:
where
in which and represent the pixel’s location within the image; ,
and
encode the color of the pixel in the target image and and are
hyperparameters tuning the sparseness of spatial and color features.
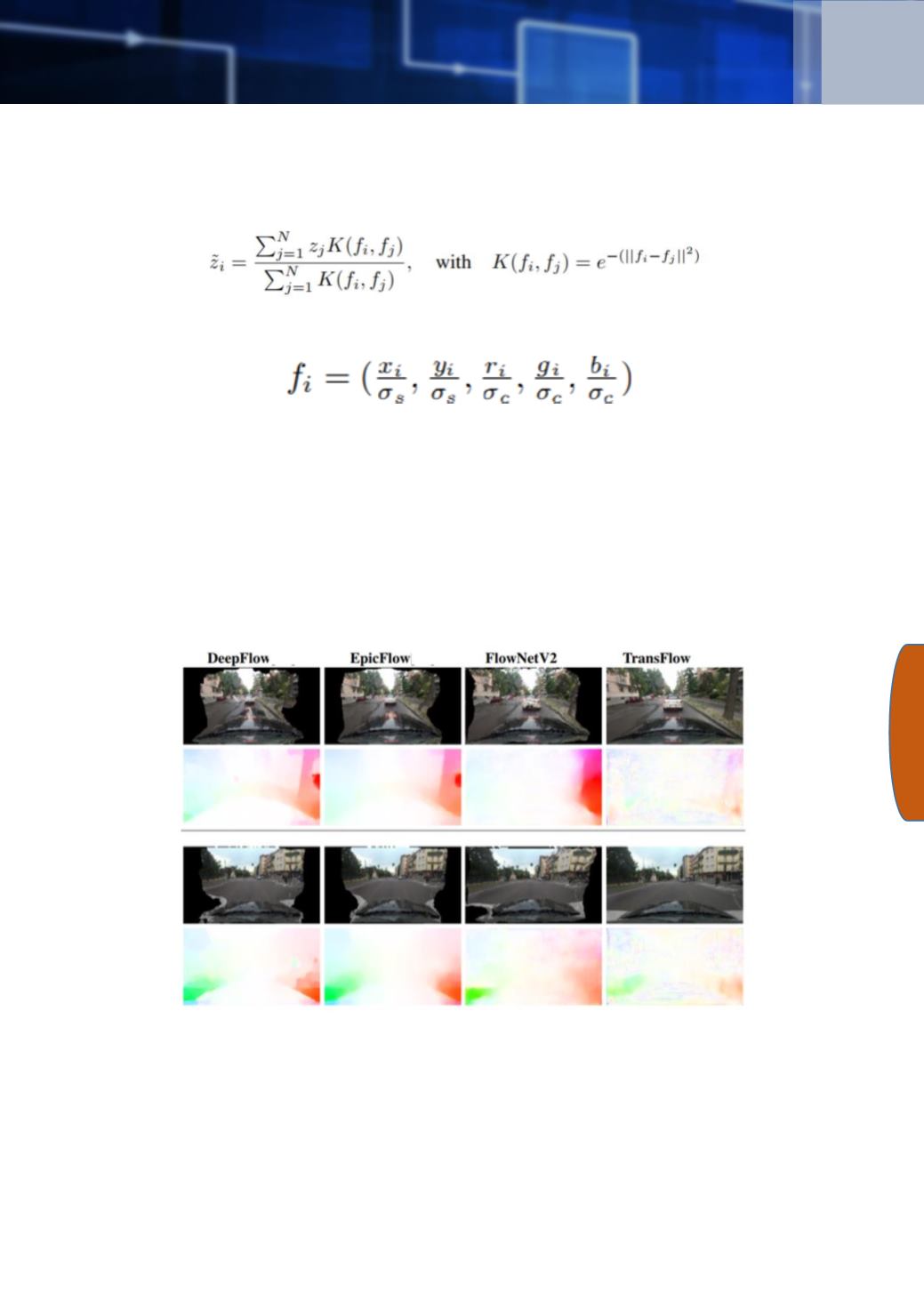
Evaluation and Results:
Qualitative assessment of frame reconstruction from the KITTI Flow 2012 dataset:
The KITTI Flow 2012 dataset was used for performance comparison, though the
network was trained on a set of image pairs sampled from the KITTI raw dataset
(dataset includes 44,000 frames acquired in the city of Karlsruhe). The table is
divided into three sections: hand-crafted and supervised methods, unsupervised
methods, and TransFlow with and without bilateral filter. After performance
measures, execution times for each method are also reported. TransFlow
compares favorably against hand-crafted and supervised methods, though not
reaching the results of DeepFlow or EpicFlow.
Computer Vision NewsResearch
7
Research