














 49 / 56
49 / 56

Computer Vision News
To summarize, the main advantages and contributions of GSM are: (1) Improved
real-time matching based on rejection of false matches, by operationalizing
statistical-based motion smoothness properties. (2) Real-time grid-based
approach. (3) approach manages to match features in previously intractable
scenes. (4) Significantly better performance than traditional SIFT, SURF and LIFT
[see the
September 2016 issue of Computer Vision News].
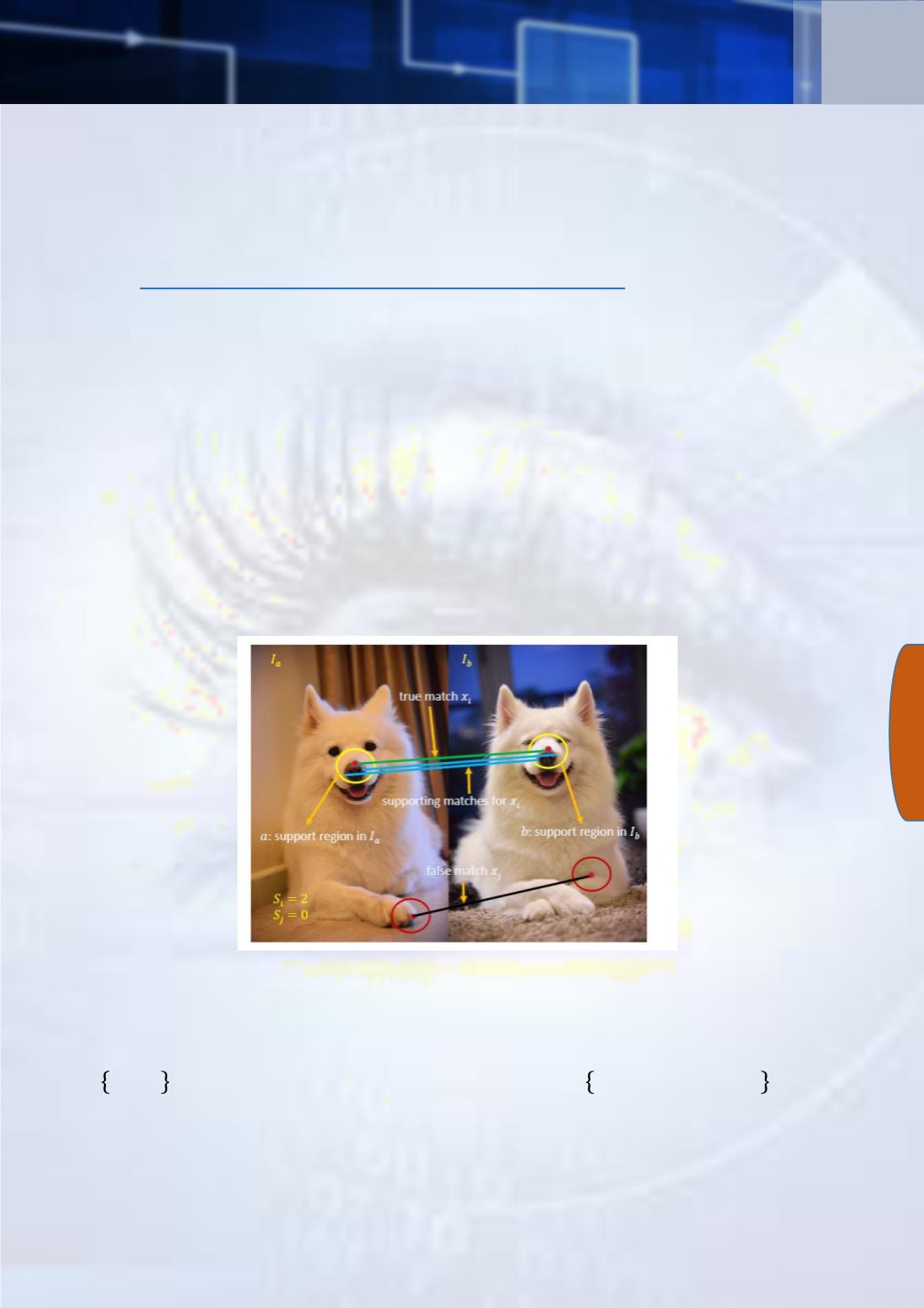
Given a pair of images taken from different views of the same 3D scene, a feature
correspondence implies a pixel in one image is identified as the same point in the
other image. If the motion is smooth, neighboring pixels and features move
together. This allows to make the following assumption that motion smoothness
will ensure that a tight neighborhood around a true match is the same 3D
location in both images, while the tight neighborhood around a false match are
two different 3D locations. Since true match neighborhoods are the same
location -- there should be many similar features in the surrounding area
(illustrate with yellow circles images below) which means many supporting
matches in the neighborhood. Conversely, false matches should have significantly
fewer supporting matches (red circles in both images). The authors operationalize
this idea into the real-time matching algorithm described next.
Method:
Before diving into the algorithm let’s define the notation we’ll be using: Image
pair
,
have
{ ,
}
features respectively;
=
1
,
2
. . .
. . .
is the set
of all nearest-neighbor feature matches between and
.
Images and
.
are
both divided into G=(20x20) cell grids as illustrated above. We enumerate the
cells of image as and the cells of image as .
|
|
is the number of
matches between cells
{ ,
}.
Computer Vision NewsResearch
49
Research