Real time SLAM in Endoscopy Applications
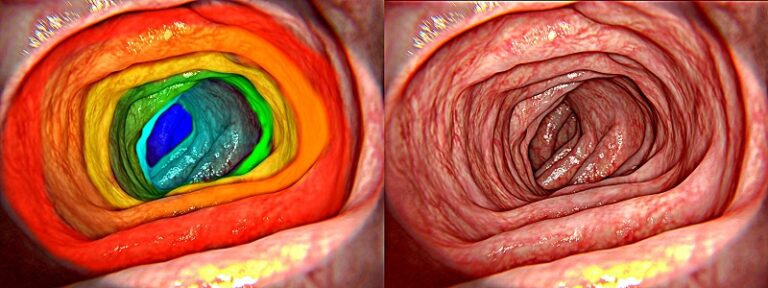
A family of algorithms called simultaneous localization and mapping (SLAM) are able, in real time, to create a 3D map of a scene captured by a camera and calculate with very high accuracy the location of the camera in the scene. As a result, RSIP Vision’s engineers are able to create a precise 3D model of the endoscope environment and calculate its exact location in that model.
Read More